
Per la prima volta è stato progettato un braccio che unisce le proprietà di arrotolamento e di adesione dei tentacoli dei polpi
La natura è ancora una volta fonte di ispirazione per nuove ed interessanti tecnologie. Il campo della robotica è tra quelli che ne usufruisce di più. In questo caso, l’animale preso come esempio è il polpo e i suoi tentacoli. Un team di ricercatori della School of Mechanical Engineering and Automation, Beihang University, e della John A. Paulson School of Engineering and Applied Sciences, Harvard University, hanno sviluppato un braccio robotico a forma di tentacolo.
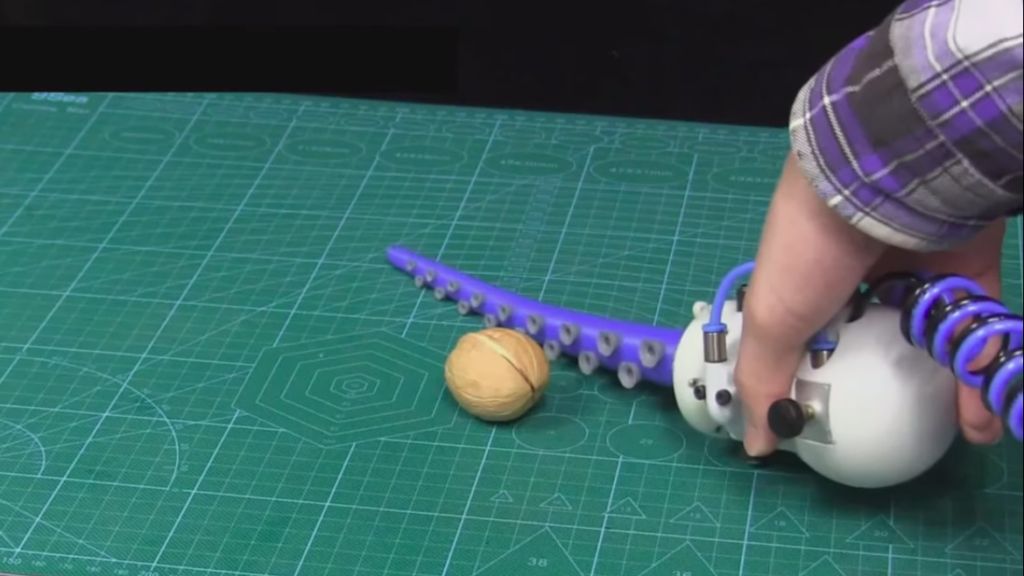
Il lavoro è stato pubblicato sulle pagine della rivista Soft Robotics. Il braccio unisce per la prima volta le proprietà di affusolamento e di presa data dalle ventose. La combinazione permette di spostare e manipolare oggetti molto diversi tra loro, con varie forme, dimensioni e consistenze. Il design fa si che il braccio si arrotoli ottenendo una presa solida ma delicata su oggetti come una noce o un uovo. Sul tentacolo robotico si trovano anche numerose ventose che, grazie al vuoto aspirato, generano una forza di adesione molto stabile che permette di spostare oggetti più grandi del braccios tesso.
Il braccio robotico è molto simile ad un vero tentacolo e ne mima in pieno le sue proprietà. Il nuovo design può promuovere la creazione di una nuova generazione di braccia “delicate” adatte ad una grande varietà di oggetti. L’invenzione aiuta anche la scienza a capire meglio le proprietà dei tentacoli dei polpi, animali incredibili ancora non compresi in pieno.